SISTEM DIGITAL & ANALOG
*
Sistem Digital adalah sistem elektronika yang
setiap rangkaian penyusunnya melakukan pengolahan sinyal diskrit.
*
Sistem Digital adalah suatu sistem yang
berfungsi untuk mengukur suatu nilai yang bersifat tetap atau tidak teratur
dalam bentuk diskrip berupa digit-digit atau angka-angka, contohnya bilangan
integer dan pecahan.
*
Sistem Digital terdiri dari beberapa rangkaian
digital/logika,komponen elektronika, dan elemen gerbang logika untuk suatu
tujuan pengalihan tenaga/energi.
* Rangkaian Digital/Rangkaian Logika adalah
kesatuan dari komponen-komponen elektronika pasif dan aktif yang membentuk
suatu fungsi pemrosesan sinyal digital
*
Rangkaian Elektronika adalah: Kesatuan dari
komponen-komponen elektronika baik pasif maupun aktif yang membentuk suatu
fungsi pengolahan sinyal (signal processing)
*
Komponen pasif dan aktif itu membentuk elemen
logika. Bentuk elemen logika terkecil adalah Gerbang Logika (Logic Gates)
Gerbang Logika: kesatuan dari komponen elektronika pasif dan
aktif yang dapat melakukan operasi AND, OR, NOT atau suatu rangkaian logika
dengan suatu keluaran dan satu atau 2 dan juga lebih masukkan. sinyal keluaran
hanya terjadi untuk kombinasi-kombinasi sinyal masukkan tertentu.
BERDASARKAN SIFAT SINYAL YANG
DIOLAH, ADA 2 JENIS RANGKAIAN ELEKTRONIKA
n Rangkaian
Analog: rangkaian elektronika yang mengolah sinyal listrik kontinyu
n Rangkaian
Digital: rangkaian elektronika yang mengolah sinyal listrik diskrit
RANGKAIAN
DIGITAL
n Bagian-bagiannya terdiri atas beberapa
gerbang logika
n Outputnya merupakan fungsi pemrosesan sinyal
digital
n Input dan Outputnya berupa sinyal digital
CIRI-CIRI SISTEM DIGITAL
n
Bagian-bagiannya
terdiri atas beberapa rangkaian digital,gerbang logika,& komponen lainnya
n
Outputnya
merupakan fungsi pengalihan tenaga
n
Input
dan Outputnya berupa suatu tenaga/energi
KELEBIHAN SISTEM DIGITAL
n Sistem digital secara umum lebih mudah
dirancang
n Penyimpanan informasi lebih mudah
n Ketelitian lebih besar
n Operasi dapat diprogram
n Untai digital lebih kebal terhadap derau
(noise)
n Lebih banyak untai digital dapat dikemas
dalam keping IC
BENTUK GELOMBANG SINYAL
DIGITAL
Sistem
digital hanya mengenal dua kuantitas untuk mewakili dua kondisi yang ada.
Kuantitas tersebut disebut dengan logika.
Logika 1
mewakili kondisi hidup dan logika 0 untuk kondisi mati. Sehingga bentuk
gelombang pada sistem digital hanya mengenal 2 arah, yaitu logika 1 dan logika
0
GAMBAR GRAFIK DIGITAL
IDEAL
BEBERAPA KEUNGGULAN DARI SISTEM DIGITAL ADALAH :
1.
Teknologi digital menawarkan biaya lebih rendah, keandalan (reability) lebih
baik, pemakain ruang yang lebih kecil dan konsumsi daya yang lebih rendah
2.
Teknologi digital membuat kualitas komunikasi tidak tergantung pada jarak
3.
Teknologi digital lebih bergantung pada noise
4.
Jaringan digital ideal untuk komunikasi data yang semakin berkembang
5.
Teknologi digital memungkinkan pengenalan layanan-layanan baru
6.
Teknologi digital menyediakan kapasitastransmisi yang besar
7.
teknologi digital menawarkan fleksibilitas
REPRESENTASI ANALOG:
Besarannya dinyatakan dalam
tegangan, arus atau gerakan meter yang proporsional dengan nilai dari besaran
itu sendiri
Contoh
:
-Speedometer sepedamotor
(kecepatan sepeda motor ditunjukkan oleh gerakan jarum)
-Thermostat ruangan
(temperatur ruangan ditunjukkan oleh gerakan strip metalnya)
-Mikrofon pada peralatan
audio
REPRESENTASI DIGITAL
Besarannya tidak hanya ditunjukkan
dalam nilai yang proporsional saja, tetapi juga dalam simbol
yang
dinamakan digit.
Contoh
:
-Jam digital
-Kalkulator
-Counter pulsa telepon
-Termometer digital
PERBEDAAN SISTEM ANALOG & DIGITAL
**SISTEM DIGITAL
Kombinasi
dari sejumlah peralatan yang didesin untuk memanipulasi informasi logika atau
besaran fisik yang dinyatakan dalam bentuk digital; nilainya berupa nilai-nilai
diskrit. Sebagian besar berupa peralatan elektronik, juga bisa mekanik,
magnetik atau pneumatik.
Contoh : komputer, kalkulator, audio
dan video digital, system telepon.
**SISTEM ANALOG
Terdiri
dari sejumlah peralatan untuk memanipulasi besaran fisik yang dinyatakan dalam
bentuk analog. Besarannya bisa bervariasi dalam rentang nilai yang kontinyu.
Contoh : audio amplifier, magnetik
tape recording, switch lampu
KEUNGGULAN SISTEM DIGITAL
1. Mudah dalam mendisain
2. Mudah dalam penyimpanan informasi
3. Ketepatan dan akurasi tinggi
4. Pengoperasiannya dapat diprogram
5. Lebih tahan terhadap noise
6. Dapat dibuat dalam chip IC
CARA MEMPROSES SISTEM ANALOG MENGGUNAKAN TEKNIK
DIGITAL ?
Ada 3 langkah :
1. Ubah input analog menjadi bentuk
digital
2. Lakukan pemrosesan digital
3. Ubah kembali output digital ke
dalam bentuk analog
RANGKAIAN DIGITAL
Didesain untuk menghasilkan output
digital yang bervariasi ‘0’ atau ‘1’
TRANSMISI SERIAL DAN PARALEL
Salah
satu aspek penting dalam sistem digital adalah memindahkan data → Transmisi
*Berdasarkan
jumlah circuit/kabel yang menghubungkan kedua tempat tersebut, ada 2 jenis
transmisi:
1.
Transmisi Paralel → jumlah circuit yang terhubung lebih dari 1
2.
Transmisi Serial → jumlah circuit yang terhubung hanya 1
Kelebihan/kekurangan
:
-Transmisi
Paralel → waktu pengiriman cepat, harga mahal
Contoh
: DB-25 (printer)
-Transmisi
Serial → waktu pengiriman lambat, harga murah
Contoh
: internet (RJ-45), USB, DB 9
SWITCH DALAM RANGKAIAN ELEKTRONIKA
Transisi antara level digital ‘1’ dan ‘0’ dapat dibuat dengan
menswitch dari level tegangan satu ke level tegangan yang lain(biasanya 0 V dan
+5 V).
**Komponen-komponen yang bisa
dijadikan switch :
Dioda
Transistor
Dioda sebagai Switch :
PENGERTIAN DAN APLIKASI
SITEM DIGITAL
PENGERTIAN DIGITAL :
*Menurut kamus besar
indonesia : DIGITAL
adalah semua yang berhubungan dengan angka-angka untuk sistem perhitungan atau
penomoran.
*DIGITAL adalah hasil teknologi yang mengubah
sinyal menjadi kombinasi urutan bilangan yang mempunyai harga 0 dan 1 (bilangan
biner) yang terdapat dalam sebuah sistem elektronik tertentu untuk proses
informasi yang mudah, cepat dan akurat. Sinyal tersebut disebut sebuah bit.
*Sistem digital mirip dengan sandi morse dimana
menggunakan tanda titik (.) dan strip (-) untuk mewakili suatu nilai.
CONTOH
APLIKASI SISTEM DIGITAL
• Pengiraan (Computing)
Dua mesin pengiraan utama adalah komputer
digital dan kalkulator. Secara ringkasnya,kalkulator menerima data dan arahan
(instructions) dalam bentuk nombor. Untukmemudahkan pertukaran nombor kepada
isyarat yang difahami oleh litar elektronik,maka sistem nombor yang digunakan
adalah deretan biner (0 dan 1).Pada komputer, data berupa teks,suara,gambar,daan
lainnya disimpan dalam deretan 0 dan 1 (biner).Pada sistem digital 0 dan 1 itu
merupakan bahasa yang digunakan untuk mempermudah dalam betukar informasi
antara si pemberi dan penerima informasi.
• Komunikasi
Dalam bidang komunikasi, contoh
penggunaan sistem digital seperti Litar elektronik dalam mesin faksimile,
sistem radar dan antena,serta penggunaan satelit di angkasa lepas.
•
Kawalan Automasi
Dalam bidamg automasi,contoh penggunaan
sistem digital seperti mesin dan robot dalam pembuatan sesuatu produk dan lif.
Contoh
lain pengguaan sistem digital, seperti :
1. Aplikasi Handphone > kompilasi beberapa
unit yang digunakan untuk mengirim dan menerima sms.
2. Aplikasi LCD
3. Aplikasi camera
CIRI KHAS DARI SINYAL DIGITAL ADALAH :
1.Mampu
mengirimkan informasi dengan kecepatan cahaya yang dapat membuat informasi
dapat dikirim dengan kecepatan tinggi.
2.Penggunaan
yang berulang-ulang terhadap informasi tidak mempengaruhi kualitas dan
kuantitas informasi itu sendiri.
3.Informasi
dapat dengan mudah diproses dan dimodifikasi ke dalam berbagai bentuk,
4.Dapat
memproses informasi dalam jumlah yang sangat besar dan mengirimnya secara
interaktif.
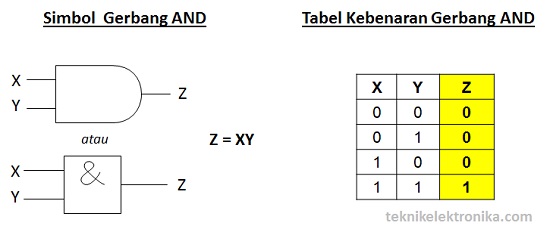
PENGUNAAN SISTEM DIGITAL
Pada
umumnya rangkaian digital menggunakan komponen DTL (Dioda Transistor Logik),
TTL (Transistor-Transistor Logik), dan CMOS (Complementry Metal Oxide
Semiconductor). Rangkaian digital biasanya terdiri dari berbagai gerbang yang
mempunyai fungsi logika yang berbeda. Tiap gerbang yang mempunyai satu atau
lebih masukan dan keluaran .Yang paling penting dari gerbang-gerbang tersebut
apa yang dinamakan dangan gerbang dasar (Basic Gates) terdiri dari gerbang
fungsi logika DAN, ATAU, TIDAK (AND, OR, NOT Gates). Dengan menghubungkan
gerbang-gerbang pada berbagai cara, bisa membangun rangkaian berfungsi
Aritmatik atau fungsi lainnya sesuai dengan kemampuan intelegensi personalnya.
DASAR-DASAR TEKNIK DIGITAL
Sistem bilangan biner
atau sistem bilangan basis dua adalah sebuah sistem penulisan angka dengan
menggunakan dua simbol yaitu 0 dan 1. Sistem bilangan biner modern ditemukan
oleh Gottfried Wilhelm Leibniz pada abad ke-17. Sistem bilangan ini merupakan
dasar dari semua sistem bilangan berbasis digital. Dari sistem biner, kita
dapat mengkonversinya ke sistem bilangan Oktal atau Hexadesimal. Sistem ini juga dapat kita sebut dengan
istilah bit, atau Binary Digit. Pengelompokan biner dalam komputer selalu
berjumlah 8, dengan istilah 1 Byte.
Dalam istilah komputer, 1 Byte = 8 bit. Kode-kode rancang bangun
komputer, seperti ASCII, American Standard Code for Information Interchange
menggunakan sistem peng-kode-an 1 Byte. Bilangan desimal yang dinyatakan
sebagai bilangan biner akan berbentuk sebagai berikut :
Contoh:
mengubah bilangan desimal menjadi biner. desimal = 10. \Berdasarkan referensi diatas yang mendekati
bilangan 10 adalah 8 (23), selanjutnya hasil pengurangan 10-8 = 2 (21).
sehingga dapat dijabarkan seperti berikut:
10 = (1 x 23) + (0 x 22) + (1 x 21) + (0 x 20). Dari perhitungan di atas bilangan biner dari
10 adalah 1010 Dapat juga dengan cara
lain yaitu 10 : 2 = 5 sisa 0 (0 akan menjadi angka terakhir dalam bilangan
biner), 5 (hasil pembagian pertama) : 2 = 2 sisa 1 (1 akan menjadi angka kedua
terakhir dalam bilangan biner), 2 (hasil pembagian kedua): 2 = 1 sisa 0 (0 akan
menjadi angka ketiga terakhir dalam bilangan biner), 1 (hasil pembagian
ketiga): 2 = 0 sisa 1 (0 akan menjadi angka pertama dalam bilangan biner). Karena hasil bagi sudah 0 atau habis,
sehingga bilangan biner dari 10 = 1010
atau dengan cara yang singkat 10:2=5(0),5:2=2(1),2:2=1(0),1:2=0(1) sisa
hasil bagi dibaca dari belakang menjadi 1010.
Bagaimana aplikasi bilangan binary dalam elektronika?
 |
| GAMBAR 1 |
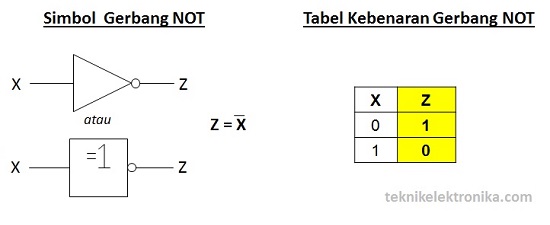
Rangkaian
transistor switching yang digambarkan sebagai berikut: Bila A di-ground (low), maka titik C
mempunyai potensial yang tinggi (high), dan bila A diberi potensial (high),
maka transistor tersebut akan menghantar sehingga potensial pada C akan kecil
(low). Dengan kata lain, bila A=0, maka
C=1, sedangkan bila A=1, maka C=0.Nah dalam contoh tersebut maka circuit itu
dinamakan inverter dan dalam teknologi digital disebut NOT-gate dan mempunyai
simbol logic dan ekspresi Boolean sbb :
 |
| GAMBAR 2 |
Bagaimana jika
rangkaian tersebut terdiri dari 3 transistor
switching seperti gambar berikut ini:
 |
| GAMBAR 3 |
Bila
pada A adalah low dan pada B low, maka C1 high dan TR3 tidak menghantar,
sehingga C pada low. Bila A adalah high dan B tetap low, maka C tetap pada
posisi low demikian pula sebaliknya. C
akan menjadi high hanya bila A dan B kedua-duanya high. Nah rangkaian atau circuit tersebut
dinamakan AND-gate dengan simbol logic dan ekspresi Boolean sbb:
 |
| GAMBAR 4 |
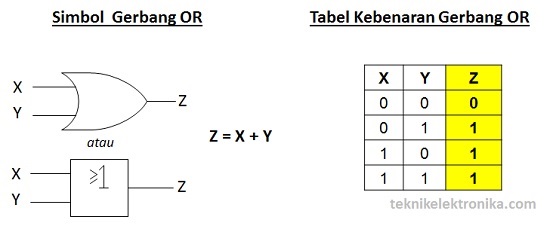
Coba kita
perhatikan lagi gambar 3 diatas, pada rangkaian tersebut bisa juga C akan high
bila salah satu A atau B dalam posisi high, maka bila terjadi hal demikian maka
rangkaian tersebut dinamakan OR-gate dengan simbol logic dan ekspresi Boolean
sbb:
 |
GAMBAR 5
|
CONTOH
ALAT YANG MENGGUNAKAN SISTEM
DIGITAL + KEGUNAANNYA :
1. CUTTER
ID = kegunaannya adalah
untuk membuat (termasuk memotong) ID card.
2. PRESS TEXTILE = kegunaannya adalah untuk
melakukan sablon digital ke kaos, t-shirt, keramik, dll.
3. DTV
(Televisi Digital)
= adalah jenis televisi yang menggunakan
modulasi digital dan sistem kompresi untuk menyiarkan sinyal gambar, suara, dan
data ke televisi.
4. PLOTTER = peralatan output yang
digunakan untuk menggambar grafik dan lain-lain.
5. TENSI DIGITAL = alat yang mengukur
tekanan darah.
6. TERMOMETER
DIGITAL = alat untuk
mengukur suhu.
7. KAMERA
DIGITAL = untuk
mengambil gambar (memfoto)